 World of O News
World of O News
Did you find the article on Thierry Gueorgiou’s “Full speed – no mistake” technique (Gueorgiou’s story part II) interesting? In that case, this follow-up article about “Analyzing your map reading in orienteering” by Martin Lerjen should interest you a lot. This article compares different map reading technique – one of them being part of Gueorgiou’s “Full speed – no mistake” technique. Reading this article might help you to find out how to change your orienteering technique to get closer to the technique of Gueorgiou. Thanks a lot to Martin for allowing me to publish this article on World of O. You can find the original pdf-version here.
VISIONARY HEAD START
If you have visionary head start, then you can navigate and run at full speed.
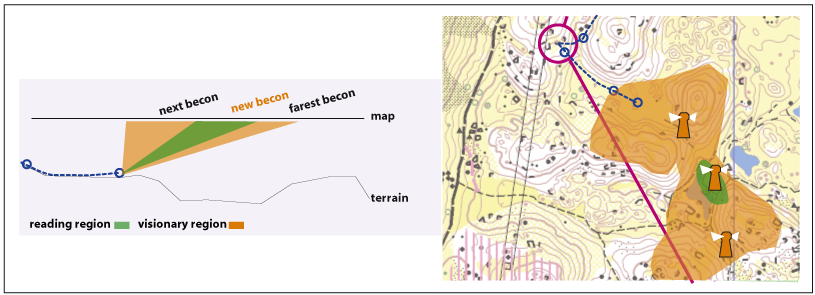
Visionary head start happens when you have a vision of the terrain to come, including specific technically significant features. I call these significant features “beacons”. The beacons divide a leg into segments and provide points of navigation and confirmation. If you have visionary head start, then you can navigate and run at full speed.
Here’s a part of an interview with Thierrry Gueorigou published in o-sport 5-2004, where he
gets it to the point:
o-sport: So, what would you say is the biggest difference between Thierry in 2001 and today?
I would say that in 2001 I was an orienteer who knew all the time exactly where he was. At present, I’m an orienteer, who knows where he’ll be in the next 100 meters.
o-sport: So, you are all the time, in fact, running in the future?
… but, in my mind, I’m already some 200 meters ahead.
Yes, and that’s very important. I may actually be running through a certain space; but, in my mind, I’m already some 200 meters ahead. All the time I try to keep my head up and to look for features as distant as possible. Moreover, in 2001 I was reading the features only, when I passed them; so I was not really running in the present, but in the past. I think this is the case with most not-so-good, young orienteers. They orienteer the way I did in 2001, and it is natural. This is very comfortable and far less challenging than the way I orienteer now. And, of course, you have to work really hard to change that.

PROPERTIES OF MAP CONTACT
If you know where you want to read, then the map contact doesn’t take much time.
- Where on the map do you want to read?
(a) You know where you want to read
(b) You don’t know where you want to readhis property has a lot to do with how long the map contact takes. If you know where you want to read, then the map contact doesn’t take much time. But, if you don’t know where you want to read, then you have to first find yourself on the map. That takes more time.
- Where are you focusing compared to your current position?
(a) You are reading something you have passed
(b) You are reading the areas you are currently in
(c) You are reading something that is ahead of you (that you can’t yet see)If you are reading something you’ve passed, you are behind. You have to find an explanation for what happened. This is dangerous. Sometimes you reach the wrong conclusion. When you read the area you are currently in, you are usually trying to get the map and terrain to fit together. When you are reading ahead, you are preparing for something that you can’t yet see.
- Where are you focusing compared to your current vision?
(a) You have no beacons in front of you
(b) You are reading areas where you already have a vision (e.g. between beacons)
(c) You are reading further ahead than your next beaconWith no beacons, you are running based on ideas (minimal and incomplete headstart) or “blind” with your compass. In the second case, you are adding details. When you read further ahead, you are preparing and extending your visionary headstart.
- What is the result of the map contact?
(a) You have a new beacon, so you have extended your vision
(b) You have a new beacon providing more detail to your existing vision
(c) You have an idea of what is coming next
(d) You have an explanation for what you did
(e) You now know where you are
TYPES OF MAP CONTACT
The properties of map contact combine into five main types of map contact.
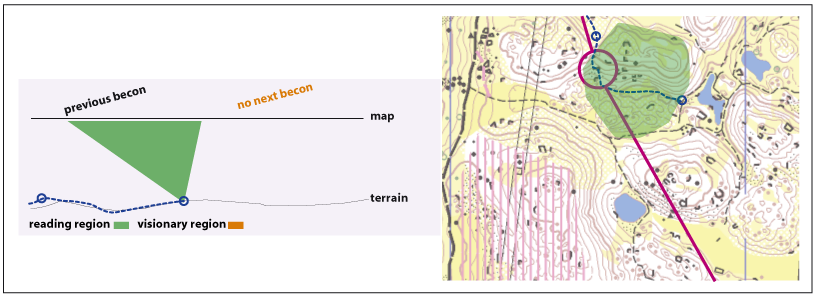
- Retrospective (1a -2a – 3a – 4d)
You ask yourself, “where am I?” You have to look at the area you have passed since you last knew where you were. You have to remember what you have passed and work with what you can see. After some time you might find out where you are (or not!).
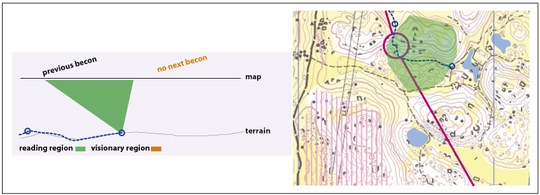
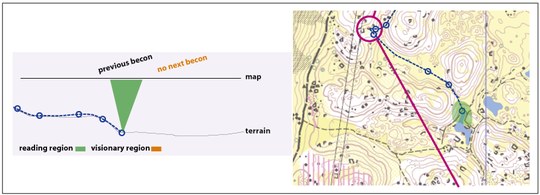
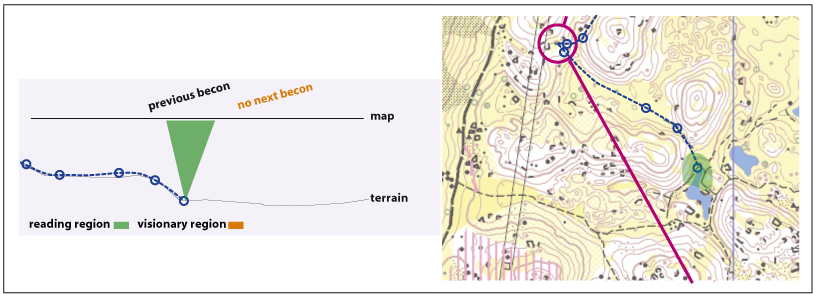
- Reading-the-next-step (1b – 2c – 3c – 4c)
It is not that you don’t know where you are, but that you ended your map contact with only the next step. This is probably the shortest type of map contact. You don’t usually have time to develop a vision but only an idea. Usually, you are forced to read the next step after the previous step is over. In the example, you decided to run along the left side of the lake. You will be forced to read the map again at the trail junction.
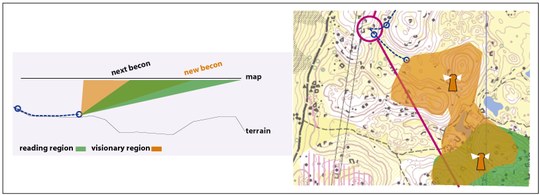
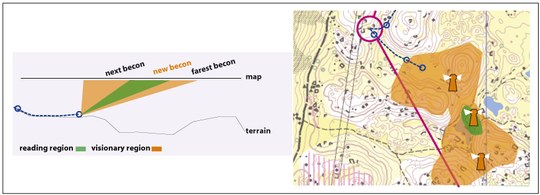
- Visionary (1a – 2c – 3c – 4a)
Visionary map contact stretches out the visionary headstart – the area you have already
prepared – the 200 meters in front of you that TG mentioned. Having this headstart lets
you look ahead and concentrate on micro-routechoice. That lets you make your next map
contact without bad surprises from the terrain.A sub-type of visionary map contact is preparing other legs. I call this “preloading map
contact.” Ideally you would start a leg entirely preloaded.
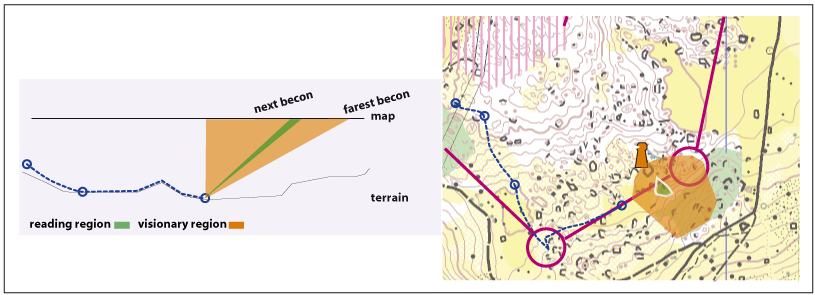
- Affirmative (1a – 2b – 3b – 4e)
Affirmative map contact is very short. You are sure about where you are and where you are going (between two beacons). It happens when you pass something you didn’t expect but that you think will be on the map (e.g. a boulder). You know where it should be on the map, you check, and there it is. Affirmative map contact usually happens when you first see something in the terrain rather than on the map.
- Detailing (1a – 2c – 3b – 4b)
After you have the big picture of a leg, you might spend some time looking at the map to identify details you will pass. You are building up steps and additional beacons that make your orienteering more stable.

MAP CONTACTS DISCUSSION
Retrospective map contact is bad. You never want to use it.
Different types of map contact take different amounts of time. I think that retrospective takes the most time, followed by visionary and detailing. Affirmative and next-step both take very little time. But, except for retrospective, the amount of time for map contact doesn’t really matter. How else could the best orienteers also be the ones with the most map contacts (and I’m assuming the most map contact time). I think the answer is that it isn’t the amount of time you invest reading the map, but the effect of it on your running and orientation in the terrain that makes you faster or slower.
Retrospective map contact is bad. You never want to use it. It is the price you pay for losing map contact and navigating based on just ideas.
Next-step map contact is quite short, but has to be done often. The specific time that you have next-step map contact is forced by the distance of your visionary head start. If you’re force to use next-step map contact where the map reading is hard to do (for example, in rocky footing), you might delay reading the map and keep running based on the general idea you have. Bad!
You may also be unwilling to invest in developing a vision after that. It is a vicious circle.
That will make the next map contact retrospective. It will take some time just to find out where you are. You may also be unwilling to invest in developing a vision after that. It is a vicious circle. This running on the edge has another negative effect. By getting closer to the end of your own visionary head start, details come into view that you can’t use because you haven’t prepared for them. So, although is uses little time, next-step reading has a lot of negatives because of the risk of falling off and the harm to fluent orienteering. I don’t think anyone uses only nextstep map reading. But, I think mistakes at the elite level often result from next-step reading in situations that look easy enough that longer looks at the map don’t seem necessary or when an orienteer doesn’t look at the map after preloading a general idea.
Your running speed is much higher because you can focus on the horizon.
Visionary map contact takes a little bit longer time, but it builds a base for more-or-less the
entire leg. Your running speed is much higher because you can focus on the horizon and make good micro-route choices, reading the map when it fits best (i.e. when you can read without slowing down much).
Affirmative and detailing map contact give you a strong feeling of having full control. Affirmative and detailing map contacts depend on having previously had a visionary map
contact. On the other hand, next-step and retrospective map reading happen when you haven’t previously had a visionary map contact. To turn this around, a visionary map contact is a good defence against next-step and retrospective reading.
Therefore it is always worth investing time in visionary map reading.
Therefore it is always worth investing time in visionary map reading. Do it at the beginning of the race and of the legs and you will always have a visionary head start. In races that are important: don’t neglect reading the map. If you feel like you are being forced to read and that you are starting to fall into the next-step trap, you can save yourself: invest three seconds in developing a visionary head start (and then you can run like the devil).

ANALYZE YOUR MAP READING
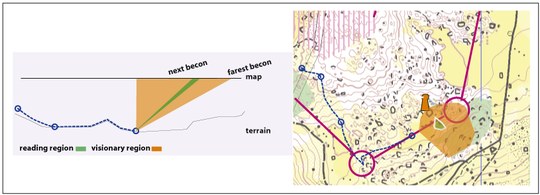
Here is a way to bring the visionary head start perspective to your orienteering and to analyze the reasons for your mistakes. It is easy. Take it leg-by-leg. Try to remember where on the leg you read the map and what the result was. Mark these points on your route and label them by the type of map contact. Sometimes two types come directly after each other. Next, project these points onto the direct line between the controls. Next, ask yourself ‘what was my visionary head start after the map contact?’ or, in other words, ‘what was the distance to the furthest “beacon” on this leg?’ Draw that distance at a right angle to with the line connecting the controls from the point you noted for the map contact. As you advance on the leg, without reading, the distance to the furthest beacon diminishes, so draw your line of your visionary head start at an angle of 45 degrees towards the direct line between the controls (until your next map contact, where your visionary headstart might grow again).
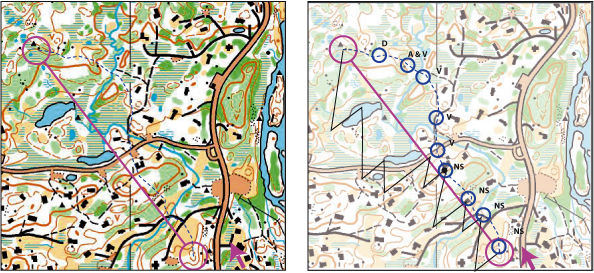
In the above example you see a classic “take off”. Because the first part of the leg is very easy, the runner runs just down “to the road”. Arriving there he realizes that the situation is more complex, then just “the road” but a junction. As he asks himself how to proceed, he’s already on the junction and he has to decide fast. He finds the not expected road on the map, decides to follow it until it crossed the river and then to continue towards the general direction. Under pressure, he only reads as long as necessary. So reading for the next part of the leg is dominated by the pressure to decide and he takes it step-by-step. He leaves the road, crosses the hill, runs down to the big road. As he realized that he is always a little behind, he makes a short stop on the road to read a bigger part of what is to come. He continues to run, gains more control and becomes more fluid in running and reading the map.
You don’t have to analyze each leg like this, but you can use it to analyze your technique in
general from this point of view. And maybe you’ll gain a new understanding for some mistakes you made.

CONCLUSION
The strength of this method is, that it is able to explain fluid and non-fluid orienteering such
as stable and risky orienteering. The strength of the model is, that it helps you to save yourself from falling out of the flow as it helps you to get back in. Just focus on a solid visual headstart.
The model of the visionary head start was inspired by an interview with Thierry Gueorgiou in
O-Sport and his analysis “The Golden Route Choice” which documented his victory in the
2004 middle distance WOC in Sweden combined with the work of the swiss psychologist
Reto Venzl in the early nineties about mental issues in orienteering. I refined these ideas based on descriptions of good and bad races by Michal Smola, Matthias Merz, Daniel Hubmann, Benno Schuler, Emma Engstrand, David Schneider, Christian Rogenmoser and Martina Fritschy. Interesting to me is that analyses from international elite runners suggest that bad races and horrible mistakes often correspond with spending too little time map reading and in not building up a solid visionary head start. Perfect races are often described as “I was always in front” (Daniel Hubmann after winning the World Cup Sprint Final, Italy 2005).
Perspective
Just counting the number of map contacts is, to me, quite useless because you don’t get
information about the quality of the map contacts. We need research on the quality of map
reading. For example, it would be very interesting to know how much time elite orienteers
lose when orienteering as opposed to running full speed along a marked course. GPS
technology can be used. Does the percentage of loss significantly vary among the group and can therefore some conclusions be made referencing to their orienteering? I expect that
visionary map reading lets you orienteer nearly as fast as you can run (or maybe even faster due to mental factors) .
Bern, Switzerland – Martin Lerjen
I think Martin needs to make his terminology and diagrams more simple. The use of meaningless and confusing terms like ‘visionary head start’ makes it very difficult to follow – it’s like reading Foucault and the other French post-structuralists. Of course, this may be what he’s aiming for so that ordinary orienteers can’t understand it. Fortunately, I can understand Thierry’s articles even though his English is not perfect.
these are the best article I’ve ever see.I ll wait for next article . Good job Martin