 World of O News
World of O News

Dead running is probably the separation method which has best potential for spreading runners without the course planner needing to make significant compromises (except for increased start interval). For all other known spreading methods, the course maker must change the course layout – i.e. the butterflies, phi-loops or the other spreading method “steals” part of the course. Yet, dead running has been given little attention.
… get back the good route choice courses of the old days
– The idea with “dead running” is to kill two birds with one stone, says the inventor of the method, Jarkko Ryyppö, also known as the man behind Routegadget. – We are trying to both eliminate the pack/following issues and get back the good route choice courses of the old days, Ryyppö explains. Read on to learn more about the method.
Article series about separating
This article is part IV in an article series about methods for separating runners in orienteering based on an extensive report on the topic. For background information about the report, see part I in the article series, which gives a general overview of the report along with main conclusions.
- Part I: The report
- Start Interval
- Phi loop implementations and start interval
- Part IV: Dead running (this part)
Still untested – great potential
Dead running was described and briefly discussed in the extensive report about separating runners in orienteering, but the method was not given much attention. Based on the runners comments, it is clear that few have a good understanding of the method, and therefore this article tries to explain the method in detail. Note that the method is still untested – but tests are planned in Finland this winter/spring. Dead running is especially geared towards the long distance.
What is dead running?
Dead running consists of introducing controlled delays for the runners at specific places in the course. These delays are planned in a way which gives maximum spreading throughout the start field. The suggested type of dead running introduces 2 controls with delays, giving three different “courses” – A, B and C:
- The courses are assigned to runners according to the start list in the order A, B, C, A, B, C …
- All courses are identical seem from an orienteering perspective – i.e. the only difference for the three courses is the two controls for which delays are introduced.
- At the first spreading site, course A will cause 80 seconds delay, course B 40 seconds delay and course C 0 seconds delay.
- At the second spreading site, these delays are just made even, i.e. 0 seconds for A, 40 seconds for B and 80 seconds for C.
The delay is introduced through the competitor running a stretch on a road or in the forest (similar to a penalty loop). The challenge for the method is to make the running stretches at the two controls as equal in time as possible. For this reason, the first suggestion of the method involved doing the running stretches on a road – making it easy to get equal time for the running stretches. This obviously gives constraints for the course planner, and thus the running stretches / loops should ideally be run in the forest.
Example: WOC 2009 Long distance
At the top of this page, you see an example of how dead running could be implemented in the course from WOC 2009 Long distance in Hungary (see here for the complete courses). Note that for this implementation, the running stretch is made on the road instead of in the forest. Running in the forest would make it necessary to make even less compromises for the route planner. For the various courses, we have the following loops/stretches:
- A: Two running stretches at control 8 – leading to about 80 seconds delay. No running stretches at control 20.
- B: One running stretch at control 8 – leading to about 40 seconds delay. The same around control 20.
- C: No running stretch/delay at control 8. Two running stretches/delays around control 20 (around 80 seconds delay).
Note that the runners can see from the map/control numbering how many running stretches they have to run.
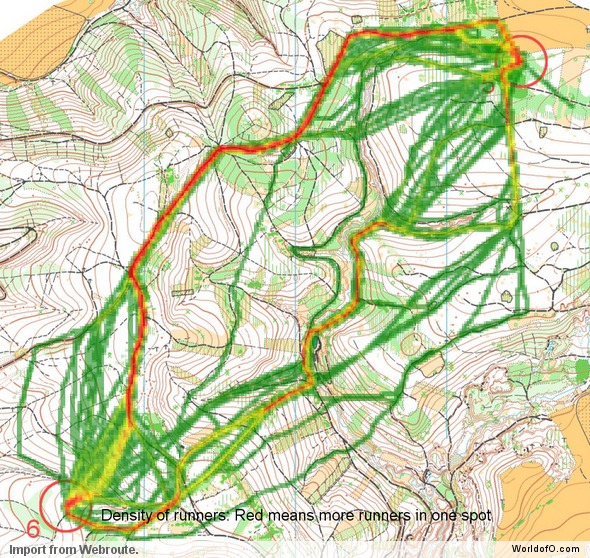
To illustrate the potential of the dead running method, Ryyppö has taken the time to show graphically what would happen if dead running would have been implemented at control number 11 in the WOC 2009 Long distance at which the butterfly loop started in the actual competition. Note that both of the pairs Hubmann/Mamleev and Gueorgiou/Gristwood are split due to the delay:

Discussion
As any spreading method, dead running raises some issues:
- Are there advantages of having the running stretches early in the course compared to late in the course?
- The runner with longest delay can try to increase the speed to catch the other runner – turning the delay into an advantage (especially if there is good visibility in the forest).
- What about map reading during the running stretches – will it be allowed? You could have map exchange at both running stretches positions, but this will destroy part of the simplicity of the method.
- The spectators will not know the actual standings before all runners have run all loops. However, it should be possible to calculate this with good accuracy either by subtracting actual split times or approximate split times.
Jarkko Ryyppö has written a document describing the method in detail. In the document Ryyppö discusses the choice of delays, course layout, how to set up the running stretches, and many of the issues regarding the method. A lot of effort has been put into making the method as fair as possible while giving maximum of spreading for the startfield.
What do you think about dead running? Can this be the future of spreading over the long distance in orienteering? Please use the comments below.
It would be great to hear comments especially about what people think is the best way to have delays: early, late or delay at both sites? And why. The plan is to give this best option to qualification winners, making race fair by giving everyone opportunity to earn this advantage by doing well in qualification race. Just like we today let best competitors start last and give them the advantage of using trails made by previous competitors.
One idea to make it a bit fairer.
When we know that dead running section will take approx. 40 seconds for fastest ones, then we could just agree that we don’t count the time to cover the dead running part at all in case it takes e.g. less than 45 seconds. Only the time that goes beyond the limit will be added to the final time. So fast runners doesn’t gain time here and slow runners doesn’t lose time and nobody can’t say that they lost some time because of slower spreading.
In addition comparing the competitors during the race would be easier.
Tarmo has a key comment: Even with just 80 seconds total dead running, this will turn the WOC into less of a pure orienteering championship, in that a person who is a very fast runner will gain time relatively to somebody who is less fast as a pure runner but a better orienteer.
Even though the classic distance often have relatively large differences in time, medals have been decided by less than the 5-10 seconds which can be the difference between the fastest and slowest runners.
@Terje: I think that fight is lost a long time ago – there are quite a few running stretches in a typical WOC long distance already (spectator control, run-in, etc.). Of course, this will add another 80 seconds to it, which isn’t good – but it is not really dramatic either. Other spreading methods also typically introduce parts of the course where the orienteering is less challenging.
I like the approach which in deed should be tested.
Some points though. I see a problem where the catched up runner has the shorter loop first (e.g. Wingsted and Glibow). In this case the method only gets effective at the second dead running.
And another point is that runners just can be catched up by having a longer dead running first or they at least deliver some useful information to their competitor (e.g.the time one is behind another).
Finally, as dead running need no orienteering, so runners benefit up to 80 seconds to just read the map prospectively e.g. to make difficult route choices. So I would at least avoid difficult controls directly after a dead running.
I would suggest to position the dead running in the middle and after 3/4 of the race. That way I expect groups to form for not more than 25% of the race, with a maximum as in cases mentioned above 50%.
One more: As at the butterflies, there is also the problem, that a runner can preview whats going to happen. (e.g. I got B so the one I catched up has A). One might think of a ‘in situ’/’in competition’ distribution of A, B and C. (e.g. defining groups basing on splittimes a control before the dead running and distribute A,B,C that the one started first gets the longest loop). This would be possible because the dead running does not need to be printed on the competitors map.
Such a modification would also weaken the argument mentioned in the NOF’s Paper, that such a method would make it hard to the spectators to follow the competition (because all the strong runners directly pass the first dead running with an A)
The map should be given to an official at the start of the dead loop and given back when the loop is completed. This way one could not gain advantage by using the dead loop for map reading in different parts of the race for the competitors.
I have another idea.. What about you have three controls with officials where the runners have to wait 1min or so.. then it is different where the runners should wait.. they should only wait one time.. I think it basically gives the same as ‘dead running’..
Lots of good thinking here.
Tarmo, I’s say that would make it quite complicated for for both organizers and spectators. And those “fast runners” would still get some advantage by getting rest seconds by being fast.
Terje, the effect of this sprading is the opposite. Courses should became more challenging as whole, that would make it pure orienteering competition that today’s races with lots of easy legs without route choice and taking same controls several times (butterfly loops). Not to mention following.
Finn, that would need a person to hold the map. Ideally method should work unmanned. Using official doing something like that would add risk of human error, like giving back wrong map. I’d say better approach would be just banning watching map and have offical and possibly video camera watching. But it would make it more complicated and we would gain nothing with it, at least if we consider map reading is fair because the advantage is earned in qual race. Think of 200m track running. First lane is not as fast as outer lanes, but race is still considered fair because anyone can earn a fast lane by running fast in semi finals. Same here, we give the best/early map reading advantage to qual winners.
Søren Bobach, stop-and-go spreading is the old idea dead running is based on. Some didn’t like stop and go because this is endurance sport and stopping and resting was seen as bad idea. It also might need officials. It might work unmanned by having clock and two punch units at control, competitors would be responsible to stop and wait at right controls. Anyway, dead runnig is enhanged version of this stop and go idea, I just changed wait&rest with dead runnig section so runners would not get rest and reveal control so easily, and offials would not be needed and map studuing would not be that easy while runniing or at least it would slow dead section runner runner down.
Martin, lots of good thinking. Assigning spreading loops on the fly to competitors would need a person to do it, so that would not work unmanned. I’d say it would be OK solution for champinship races like WOC, but maybe not for WRE races or regular national races. But personally I don’t like the idea of designing some special WOC only solutions.
About Wingsted and Glibow issue, I’d wouldn’t say spreading does not work at all threre. They would get 40 sec apart and can’t see each other any more. So it is possible they take diffrent route choice (or Glibow makes mistake), so Wingsted may pass Glibow without contact. And even if they meet, Glibow’s relative time would be 40 worse that what it would be without the spreading. And later comes second spreading of course.
—
I don’t think anyone can say what is the best aproach without doing testing and using it at real races.
We’ll see later how effective the actual spreading effect, but I believe it will be fine. So the key qustion may be what is the right level of fairness – how extremes we have to go to be able to agree it is fair? Examples:
Level 1: two loops are made as equally fas as organizer could with some test runs. And spreading courses are just randomly assigned to runners (randomizing sperading for the first starter). And that’s it, some will get advantage of reading map early, some late, and some half time at both places, but we simply consider it is fair enough.
Level 2: Organizer make first sprading slightly faster and assign that spreading to qual winners.
Level 3: As level 2, but also banning map reading while dead running.
level 4: Banning map reading and also using same spreading loop twice with setup like this to make loops 100% equal.
The higher level makes it a bit more complicated for organizers and 4th level also has big influence on course layout and makes course less challenging. How extermes we would actually need to go, I don’t know. Race is never not 100% equal, for example running over open area some may have more head wind than others and that can make couple of seconds. If loop inequality is assigned randomly just as wind speed, do we need to go to extremes (level 4) to make the inequality totally dissappear and at same time pay the price of making it impossible for course setter to make the most of the course. For example take al look at Portugal O meeting day 3 course. Is that the desired way of the future to plan long courses? I don’t say course setter did bad job – he did good job but the spreading method simply tied his hands.
When we think what is the proper level of equality we should compare it to ohter old inequality issues we already have (like time loss for pin punching if epunch unit dies, how extreme we do go today with that issue to make it fair enough) and also inequality of other spreading methods. More about equality issues of some about other methods compared to dead running here.